
จุฬาลงกรณ์มหาวิทยาลัยเปิดตัวหุ่นยนต์วีลแชร์เดินได้ “Wheelchair Exoskeleton” นวัตกรรมใหม่ที่ผสานวีลแชร์และหุ่นยนต์ช่วยเดินเข้าด้วยกัน เพื่อช่วยผู้สูงอายุและผู้มีปัญหาการเคลื่อนไหว สามารถนั่ง ลุกยืน และเดินได้ภายในอุปกรณ์เดียว
โดยรองศาสตราจารย์ ดร.รณพีร์ ชัยเชาวรัตน์ จากคณะวิศวกรรมศาสตร์ โดยได้รับทุนวิจัยจากสำนักการวิจัยแห่งชาติ และผ่านเข้ารอบสุดท้ายในโครงการรางวัลนักเทคโนโลยีรุ่นใหม่ ประจำปี 2567 เผยว่า วีลแชร์เป็นอุปกรณ์สำคัญที่ช่วยให้ผู้ที่มีปัญหาการเคลื่อนไหวสามารถใช้ชีวิตได้อย่างอิสระมากขึ้น แต่ด้วยข้อจำกัดของวีลแชร์แบบเดิมที่ไม่สามารถขึ้นลงบันไดหรือเคลื่อนที่ในพื้นที่ต่างระดับได้ ทำให้ยังมีอุปสรรคในการเดินทางและการใช้ชีวิตประจำวัน การพัฒนา Wheelchair Exoskeleton จึงเป็นการต่อยอดที่สำคัญ โดยผสานเทคโนโลยีหุ่นยนต์ช่วยเดินเข้ากับวีลแชร์ เพื่อให้ผู้ใช้งานสามารถลุกขึ้นยืนและเดินได้ในตัวเดียว ซึ่งถือเป็นแนวคิดใหม่ที่ช่วยเพิ่มคุณภาพชีวิตให้กับผู้สูงอายุและผู้ที่มีภาวะบกพร่องทางการเคลื่อนไหว
นวัตกรรมนี้ไม่เพียงแต่เป็นก้าวสำคัญของวงการหุ่นยนต์ทางการแพทย์ในประเทศไทย แต่ยังสะท้อนถึงศักยภาพของนักวิจัยไทยในการพัฒนาเทคโนโลยีเพื่อสังคม ปัจจุบันทีมวิจัยกำลังพัฒนาเวอร์ชันต้นแบบรุ่นที่สอง เพื่อเพิ่มความมั่นคงในการลุกยืนและเดินให้เป็นธรรมชาติมากขึ้น พร้อมทั้งเตรียมเข้าสู่ขั้นตอนการทดสอบการใช้งานจริงกับกลุ่มเป้าหมาย ซึ่งนับเป็นอีกก้าวสำคัญของการนำเทคโนโลยีมาใช้เพื่อเพิ่มอิสระและโอกาสให้กับทุกคน

แรงบันดาลใจและแนวคิดเบื้องหลัง
รศ.ดร.รณพีร์ กล่าวว่าแนวคิดของ Wheelchair Exoskeleton เริ่มจากข้อจำกัดของวีลแชร์ทั่วไปที่ไม่สามารถช่วยให้ผู้ใช้งานขึ้นลงรถโดยสารหรือบันไดได้ จึงพัฒนาอุปกรณ์ที่สามารถเปลี่ยนจากโหมดนั่งเป็นโหมดเดินได้ภายในตัวเดียว ซึ่งถือเป็น หุ่นยนต์ Wheelchair Exoskeleton ตัวแรกของโลกที่สร้างโดยฝีมือคนไทย
ภายใต้การดำเนินงานของ ห้องปฏิบัติการหุ่นยนต์ ภาควิชาวิศวกรรมศาสตร์ จุฬาฯ อาจารย์รณพีร์ได้ออกแบบหุ่นยนต์โดยให้นิสิตมีส่วนร่วมในการพัฒนาทุกขั้นตอน ตั้งแต่แนวคิด การออกแบบต้นแบบ ไปจนถึงการสร้างชิ้นส่วนโดยใช้เทคโนโลยีการพิมพ์สามมิติและเครื่องกลึง CNC เพื่อให้เกิดการเรียนรู้เชิงปฏิบัติจริง

หุ่นยนต์ Wheelchair Exoskeleton คืออะไร?
“Exoskeleton” หมายถึง “โครงกระดูกภายนอก” ที่ช่วยเพิ่มพละกำลังและความสามารถในการเคลื่อนไหวของผู้สวมใส่ หุ่นยนต์นี้ออกแบบให้มีระบบล้อสำหรับการเคลื่อนที่ทั่วไป และสามารถพับล้อขึ้นเพื่อเปลี่ยนเป็นโหมดเดินได้ ระบบขับเคลื่อนประกอบด้วย มอเตอร์ที่ควบคุมข้อต่อสะโพกและหัวเข่า ทำให้ผู้ใช้สามารถเคลื่อนไหวได้อย่างเป็นธรรมชาติ นอกจากนี้ ล้อซ้ายและขวาสามารถพับเก็บเพื่อช่วยให้เดินข้ามสิ่งกีดขวางได้ง่ายขึ้น
วิศวกรรมที่ผสานกับกายวิภาคมนุษย์
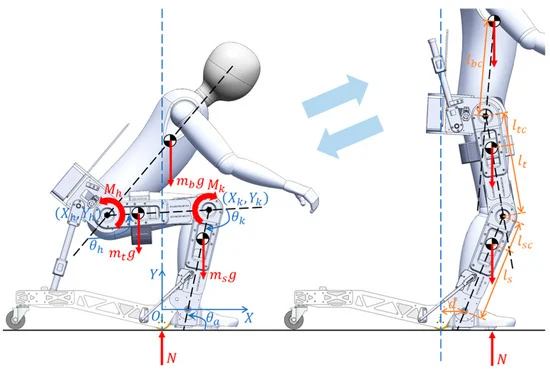
การออกแบบหุ่นยนต์นี้ต้องคำนึงถึงความเข้ากันได้ของกลไกกับร่างกายมนุษย์ (Kinematics Compatibility) โดยใช้ Four-bar Linkage ช่วยเลียนแบบการเคลื่อนไหวของข้อเข่า เพื่อให้การงอขาและเหวี่ยงขาเป็นไปอย่างเป็นธรรมชาติ รศ.ดร.รณพีร์ ยังใช้หลัก Biomechanics คำนวณแรงบิดที่เกิดขึ้นที่ข้อเท้า หัวเข่า และสะโพก เพื่อนำไปปรับปรุงระบบมอเตอร์ให้เหมาะสมกับสรีระของผู้ใช้
นอกจากนี้ ยังมีการประสานงานกับนักออกแบบจากสาขาสถาปัตยกรรมศาสตร์เพื่อพัฒนาโครงสร้างที่มีความสวยงามและใช้งานได้จริง ในอนาคต เมื่อหุ่นยนต์นี้พร้อมสำหรับการใช้งานจริง ฝ่ายสหเวชศาสตร์จะเข้ามามีบทบาทในการแนะนำการใช้งานให้กับผู้สูงอายุและผู้ป่วย
ความก้าวหน้าล่าสุดและอนาคตของโครงการ
ขณะนี้ ต้นแบบ Wheelchair Exoskeleton รุ่นที่สอง กำลังอยู่ระหว่างการพัฒนา โดยปรับปรุงให้สามารถนั่งและลุกได้มั่นคงขึ้น และรองรับการเดินที่เป็นธรรมชาติมากขึ้น พร้อมทั้งดำเนินการ จดสิทธิบัตรทรัพย์สินทางปัญญา เพื่อปกป้องนวัตกรรมและเตรียมเข้าสู่ขั้นตอนการทดสอบกับผู้ใช้งานจริง
ความสำเร็จของโครงการนี้ไม่เพียงแต่เป็นก้าวสำคัญของวงการหุ่นยนต์และเทคโนโลยีเพื่อสุขภาพในไทย แต่ยังแสดงให้เห็นถึงศักยภาพของนักวิจัยไทยในการพัฒนา นวัตกรรมเพื่อคุณภาพชีวิต ที่สามารถแข่งขันในระดับโลกได้
เนื้อหาน่าสนใจอื่นๆ : สคบ. จัดงานมหกรรมไกล่เกลี่ยเรื่องร้องทุกข์ ยกระดับการคุ้มครองสิทธิผู้บริโภคอย่างมีประสิทธิภาพ





